a comparação entre as velocidades angulares obtidas pelos giroscópios e as obtidas pelas servomotores revelou que ambas as curvas apresentaram comportamentos com o mesmo padrão, no entanto, as amplitudes apresentaram algumas divergências. As figuras que se seguem, ilustram os resultados obtidos para a grandeza da velocidade angular.


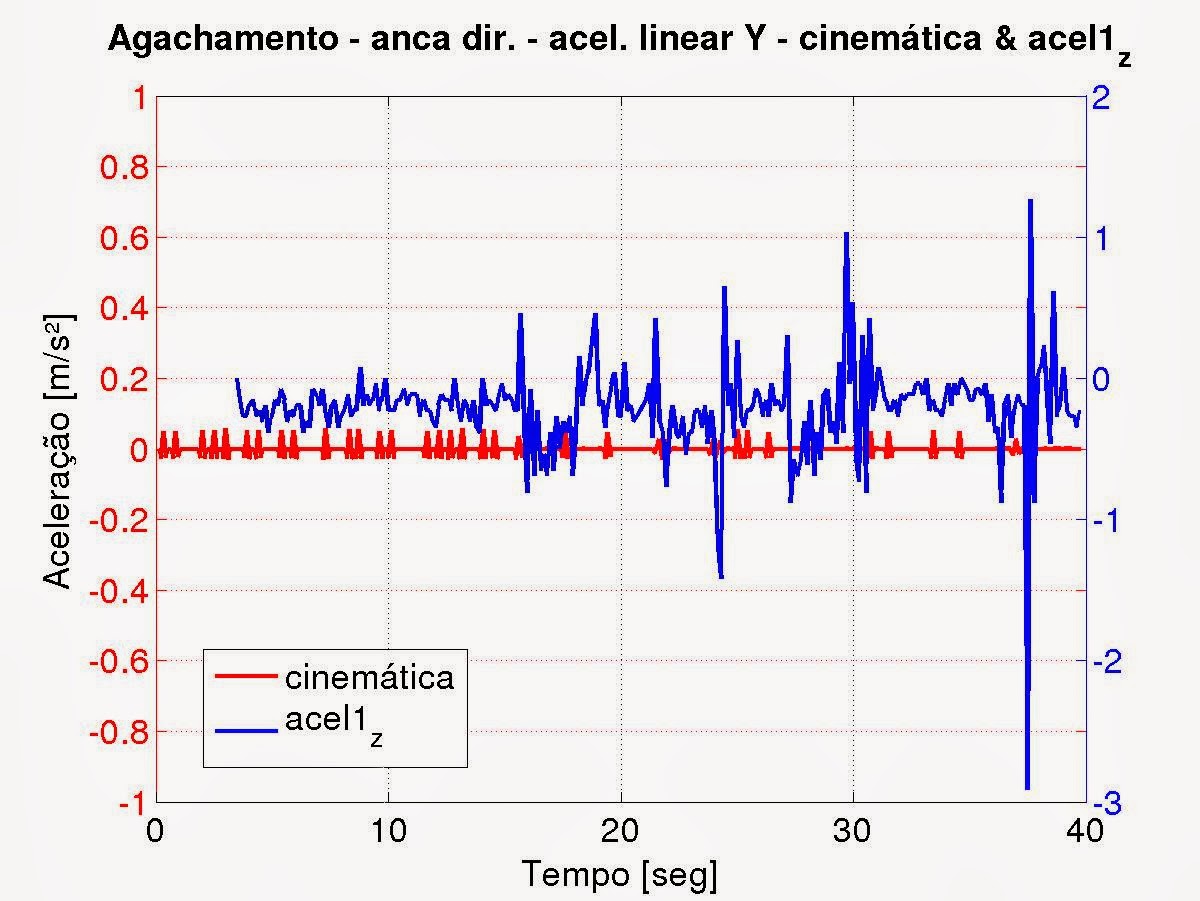
Os resultados obtidos da comparação dos valores da aceleração linear não foram satisfatórios. De uma forma geral, apresentaram-se curvas que não apresentam semelhanças, salvo algumas ocasiões onde é possível observar comportamentos semelhantes apenas em alguns "picos" de aceleração, mesmo com amplitudes de diferentes ordens de grandeza. As duas figuras que se seguem ilustram exemplos da comparação entre curvas de aceleração linear.

Os resultados obtidos na comparação entre as inclinações obtidas pelos acelerómetros e as inclinações obtidas pela cinemática apresentaram-se satisfatórios. No entanto, em alguns casos foram observadas diferenças significativas nas amplitudes dos valores, mas apenas tendo como referência a inclinação baseada na cinemática direta da perna do robô, não é possível concluir sobre estas divergências. As duas figuras que se seguem representam alguns resultados obtidos para esta grandeza. No primeiro caso apresenta-se a comparação entre curvas, cuja semelhança é elevada, e no segundo caso, uma comparação onde existe a diferença nas amplitudes obtidas.


Em última análise, foi realizado o estudo da redundância sensorial, isto é, o estudo da combinação das leituras de vários sensores sujeitos à mesma situação. As figuras que se seguem representam dois exemplos para os resultados obtidos para a redundância sensorial. Em ambos os casos, foi possível observar ligeiras melhorias.


Sem comentários:
Enviar um comentário