Para esta validação foram avaliadas as seguintes grandezas:
- velocidade angular;
- aceleração linear;
- inclinação.
A avaliação da velocidade angular realizou-se através da comparação dos dados dos giroscópios com os dados da posição angular dos servomotores derivada. Esta comparação, para as juntas do tornozelo é realizada diretamente, no entanto, para as juntas dos joelhos e anda, os dados dos servomotores são comparados com o resultado da diferença entre os giroscópios que se encontram adjacentes ao respetivo servomotor.
Para a avaliação das restantes grandezas foi necessário recorrer ao cálculo dos valores de comparação, através de um modelo de cinemática direta desenvolvido para uma perna do robô (apenas para uma porque ambas apresentam movimentos idênticos). Na próxima figura é possível observar uma simplificação de uma perna do robô, a partir da qual partiu o desenvolvimento da cinemática direta.
 |
| Diagrama simplificado de uma perna do robô humanóide. |
De seguida, seguiu-se a cadeia cinemática a partir do diagrama anterior, representada na figura seguinte.
 |
| Cadeia cinemática da perna do robô humanóide. |
Esta cadeia cinemática deu origem à seguinte tabela de Denavit-Hartenberg:
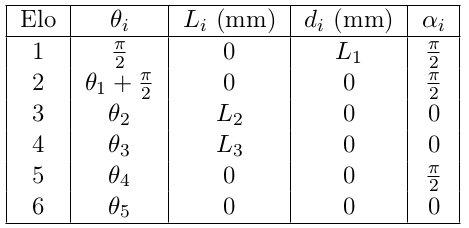 |
| Tabela de Denavit - Hartenberg para o modelo de cinemática da perna do robô humanóide. |
A partir desta tabela, obtém-se a matriz que define a posição e orientação do último ponto da cadeia cinemática, em relação ao referencial global (situação na base do pé do robô).
A partir dessa matriz, é possível chegar à equação (1), que representa a relação da velocidade de um ponto do sistema cartesiano r com a velocidade das juntas , vetos q . Essa relação é estabelecida pela matriz J , a matriz do Jacobiano.
dr = J · dq (1)
∆2 r = J · ∆2 q + ∆J · ∆q (2)
Através da diferenciação de (1), obtém-se a equação (2) que permite obter a aceleração em cada ponto da perna do robô humanóide a partir da aceleração dos servomotores. Essa aceleração é utilizada como referência que serve para a avaliação da aceleração linear.
A referência para a inclinação é obtida através da matriz de transformação T que estabelece a relação entre o último referencial da cadeia cinemática com o seu referencial base.
Sendo a matriz T,

igualando a submatriz composta pelas primeiras 3 linhas e 3 colunas, com a matriz R
matriz que representa a mesma transformação que T mas em função dos ângulos de Euler, é possível obter a inclinação de qualquer ponto da cadeia cinemática da perna do robô humanóide. Esta inclinação servirá para avaliar os resultados da inclinação calculados pelos dados dos acelerómetros.
Sem comentários:
Enviar um comentário